STM32 Learning Notes
1 配置文件介绍
STM32入门教程-2023版 细致讲解 中文字幕 - 哔哩哔哩 (bilibili.com)
1.1 start
\STM32入门教程资料\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup
startup_stm32f10x_md.s #启动文件
system_stm32f10x.c #配置时钟
system_stm32f10x.h
stm32f10x.h #外设寄存器文件,类似reg52.h,描述寄存器与地址\STM32入门教程资料\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\CoreSupport
core_cm3.c #内核寄存器描述
core_cm3.h1.2 library 标准外设驱动库函数
\STM32入门教程资料\固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\STM32F10x_StdPeriph_Driver
src和inc文件里面的所有文件
mics.c #内核的库函数,其他是内核外的库函数1.3 user
stm32f10x_conf.h #配置库函数头文件包含关系,检查函数定义
stm32f10x_it.c放中断函数
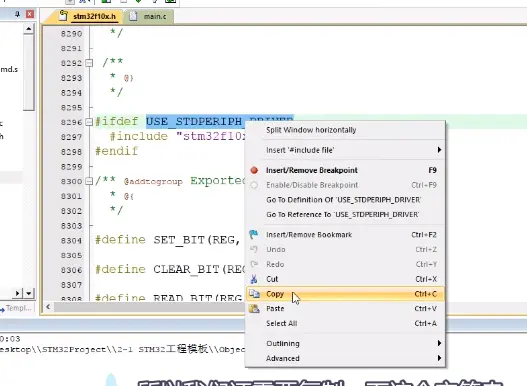
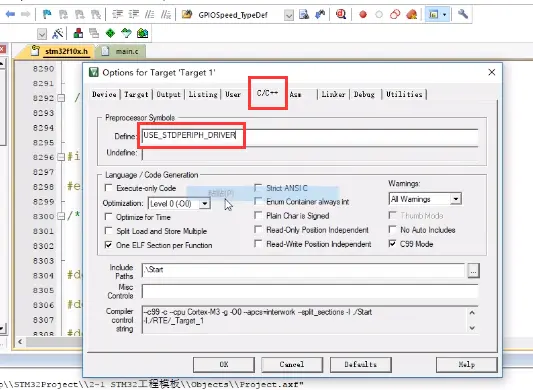
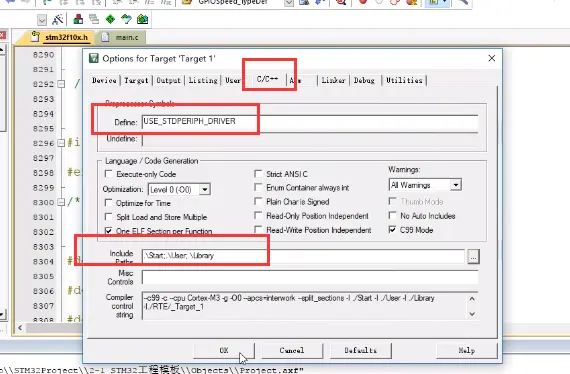
stm32f10x_it.h1.4 复制字符串、包含外设库
2 外设学习
2.1 GPIO
io口不初始化,默认浮空输入
| 八种模式 | 模式名称 | 性质 | 特征 |
|---|---|---|---|
| GPIO_Mode_IN_FLOATING | 浮空输入 | 数字输入 | 可读取引脚电平,若引脚悬空,则电平不确定 |
| GPIO_Mode_IPU | 上拉输入 | 数字输入 | 可读取引脚电平,内部连接上拉电阻,悬空时默认高电平 |
| GPIO_Mode_IPD | 下拉输入 | 数字输入 | 可读取引脚电平,内部连接下拉电阻,悬空时默认低电平 |
| GPIO_Mode_AIN | 模拟输入 | 模拟输入 | GPIO无效,引脚直接接入内部ADC |
| GPIO_Mode_Out_OD | 开漏输出 | 数字输出 | 可输出引脚电平,高电平为高阻态,低电平接VSS |
| GPIO_Mode_Out_PP | 推挽输出 | 数字输出 | 可输出引脚电平,高电平接VDD,低电平接VSS |
| GPIO_Mode_AF_OD | 复用开漏输出 | 数字输出 | 由片上外设控制,高电平为高阻态,低电平接VSS |
| GPIO_Mode_AF_PP | 复用推挽输出 | 数字输出 | 由片上外设控制,高电平接VDD,低电平接VSS |
2.1.1 输出
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
//使用各个外设前必须开启时钟,否则对外设的操作无效
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO引脚,赋值为第0号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOA的初始化
/*方法1:GPIO_ResetBits设置低电平,GPIO_SetBits设置高电平*/
GPIO_ResetBits(GPIOA, GPIO_Pin_0|GPIO_Pin_1); //将PA0,PA1引脚设置为低电平,可“与”计算
GPIO_SetBits(GPIOA, GPIO_Pin_0); //将PA0引脚设置为高电平
/*方法2:GPIO_WriteBit设置低/高电平,由Bit_RESET/Bit_SET指定*/
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET); //将PA0引脚设置为低电平
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET); //将PA0引脚设置为高电平
/*方法3:GPIO_WriteBit设置低/高电平,由数据0/1指定,数据需要强转为BitAction类型*/
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)0); //将PA0引脚设置为低电平
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)1); //将PA0引脚设置为高电平
/*使用GPIO_Write,同时设置GPIOA所有引脚的高低电平,实现LED流水灯*/
GPIO_Write(GPIOA, ~0x0001); //0000 0000 0000 0001,PA0引脚为低电平,其他引脚均为高电平,注意数据有按位取反
Delay_ms(100); //延时100ms
GPIO_Write(GPIOA, ~0x0002); //0000 0000 0000 0010,PA1引脚为低电平,其他引脚均为高电平2.1.1 输入
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB1和PB11引脚初始化为上拉输入
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //读PB1输入寄存器的状态,如果为0,则代表按键1按下
{
Delay_ms(20); //延时消抖
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0); //等待按键松手
Delay_ms(20); //延时消抖
KeyNum = 1; //置键码为1
}OLED调试
暂无
•68个可屏蔽中断通道,包含EXTI、TIM、ADC、USART、SPI、I2C、RTC等多个外设
2.2 EXIT
•NVIC的中断优先级由优先级寄存器的4位(0~15)决定,这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级
•抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队
| 分组方式 | 抢占优先级 | 响应优先级 |
|---|---|---|
| 分组0 | 0位,取值为0 | 4位,取值为0~15 |
| 分组1 | 1位,取值为0~1 | 3位,取值为0~7 |
| 分组2 | 2位,取值为0~3 | 2位,取值为0~3 |
| 分组3 | 3位,取值为0~7 | 1位,取值为0~1 |
| 分组4 | 4位,取值为0~15 | 0位,取值为0 |
主要函数介绍
void EXTI_DeInit(void); //用于将外部中断模块恢复到初始状态。
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct); //用给定的配置初始化外部中断。
void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct);//初始化指定的外部中断配置结构体。
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line); //产生软件触发的外部中断。
//在主函数内查看,触发了标志位不一定会挂起中断,这是区别
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line); /*功能:获取指定外部中断线的触发标志位状态。
返回值:标志位状态,可以是SET或者RESET。 */
void EXTI_ClearFlag(uint32_t EXTI_Line); //清除指定外部中断线的触发标志位。
//在中断函数内查看,此时可以查看是否已经开启了中断
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line); /*功能:获取指定外部中断线的中断挂起状态。
返回值:中断挂起状态,可以是SET或者RESET。*/
void EXTI_ClearITPendingBit(uint32_t EXTI_Line); //清除指定外部中断线的中断挂起位。 /*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,外部中断必须开启AFIO的时钟
/*AFIO选择中断引脚*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);//将外部中断的14号线映射到GPIOB,即选择PB14为外部中断引脚
/*EXTI初始化*/
EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量
EXTI_InitStructure.EXTI_Line = EXTI_Line14; //选择配置外部中断的14号线
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //指定外部中断线为下降沿触发
EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn; //选择配置NVIC的EXTI15_10线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
void EXTI15_10_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line14) == SET) //判断是否是外部中断14号线触发的中断
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0)
{
CountSensor_Count ++; //计数值自增一次
}
EXTI_ClearITPendingBit(EXTI_Line14); //清除外部中断14号线的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}2.3 TIM
预分频器的工作的工作原理是,定时器时钟源每tick一次,预分频器计数器值+1,直到达到预分频器的设定值,然后再tick一次后计数器归零,同时,CNT计数器值+1。
由此可以看出,因为达到最大值后还要再tick一次才归零,所以定时器时钟频率应该为Fosc/(PSC+ 1)。其中Fosc是定时器的时钟源。比如想对时钟源进行72分频,那么预分频器的值就应该设置为71。
由此可以看出,因为达到最大值后还要再tick一次才归零,所以定时器时钟频率应该为Fosc/(PSC+ 1)。其中Fosc是定时器的时钟源。比如想对时钟源进行72分频,那么预分频器的值就应该设置为71。
预分频器值寄存器TIMx_PSC存在影子寄存器(官方翻译为缓冲功能),所以在定时器启动后更改TIMx_PSC的值并不会立即影响当前定时器的时钟频率。要等到下一个更新事件(UEV)发生时才会生效。比如下边这张图就体现了将分频系数由1修改为2(即TIMx_PSC由0更改为1)时整个定时器的时序图。

更新事件(UEV)则由TIMx_CR1寄存器中的UDIS位控制,在启用时,会通过以下两种方式触发 :
- 计数器上溢
- 手动将 TIMx_EGR 寄存器中的UG 位置 1
STM32定时器(TIM)之预分频器(PSC)详解 - 知乎 (zhihu.com)
2.3.1 定时中断
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*中断输出配置*/
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位
//TIM_TimeBaseInit函数末尾,手动产生了更新事件
//若不清除此标志位,则开启中断后,会立刻进入一次中断
//如果不介意此问题,则不清除此标志位也可
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//配置NVIC为分组2
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
/*定时器中断函数,可以复制到使用它的地方
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}*/2.3.2 外部时钟中断
/*外部时钟配置*/
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x0F);
//选择外部时钟模式2,时钟从TIM_ETR引脚输入
//注意TIM2的ETR引脚固定为PA0,无法随意更改
//最后一个滤波器参数加到最大0x0F,可滤除时钟信号抖动
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元 2.3.3 时钟输出比较
•PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)
•PWM占空比: Duty = CCR / (ARR + 1)
•PWM分辨率: Reso = 1 / (ARR + 1)

/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO重映射*/
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,重映射必须先开启AFIO的时钟
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); //将TIM2的引脚部分重映射,具体的映射方案需查看参考手册
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); //将JTAG引脚失能,作为普通GPIO引脚使用
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为复用推挽输出
//受外设控制的引脚,均需要配置为复用模式
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*输出比较初始化*/
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量
TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM2的输出比较通道1
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/**
* 函 数:PWM设置CCR
* 参 数:Compare 要写入的CCR的值,范围:0~100
* 返 回 值:无
* 注意事项:CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比
* 占空比Duty = CCR / (ARR + 1)
*/
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM2, Compare); //设置CCR1的值
}2.3.4 时钟输入捕获
PWMI接占空比
/*输入捕获初始化*/
TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1
TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //极性,选择为上升沿触发捕获
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //捕获预分频,选择不分频,每次信号都触发捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //输入信号交叉,选择直通,不交叉
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
/*选择触发源及从模式*/
TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1); //触发源选择TI1FP1
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); //从模式选择复位
//即TI1产生上升沿时,会触发CNT归零
TIM_PWMIConfig(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_PWMIConfig,配置TIM3的输入捕获通道
//此函数同时会把另一个通道配置为相反的配置,实现PWMI模式编码器接口测速
/*输入捕获初始化*/
TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量
TIM_ICStructInit(&TIM_ICInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1
TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择配置定时器通道2
TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
/*编码器接口配置*/
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
//配置编码器模式以及两个输入通道是否反相
//注意此时参数的Rising和Falling已经不代表上升沿和下降沿了,而是代表是否反相
//此函数必须在输入捕获初始化之后进行,否则输入捕获的配置会覆盖此函数的部分配置
/*TIM使能*/
TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行2.3 ADC
STM32F103C8T6 ADC资源:ADC1、ADC2,10个外部输入通道
2.4 DMA
2.5 USART
2.6 I2C
2.7 SPI
 wechat
wechat alipay
alipay




